
Maze Robot 2018
2018
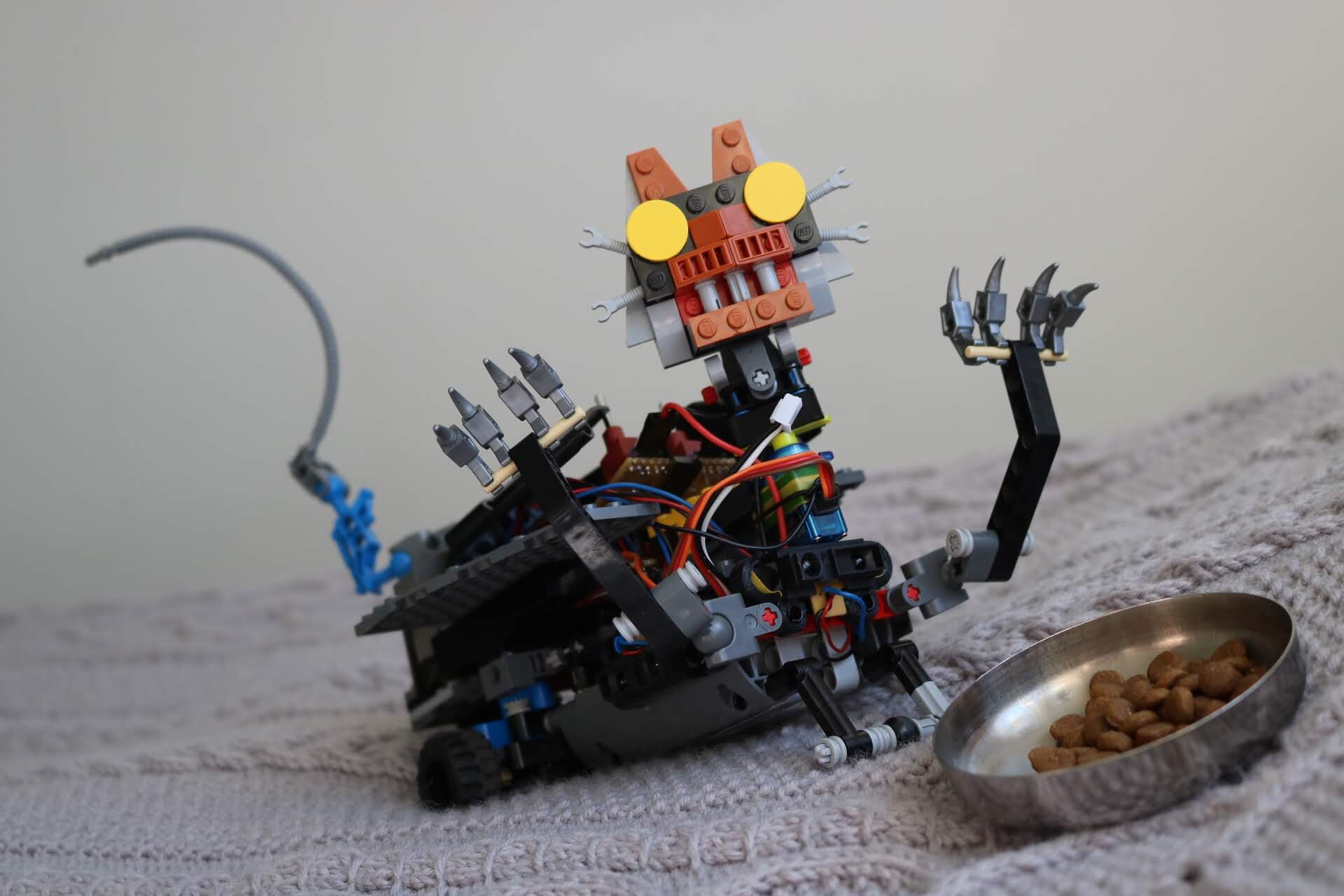
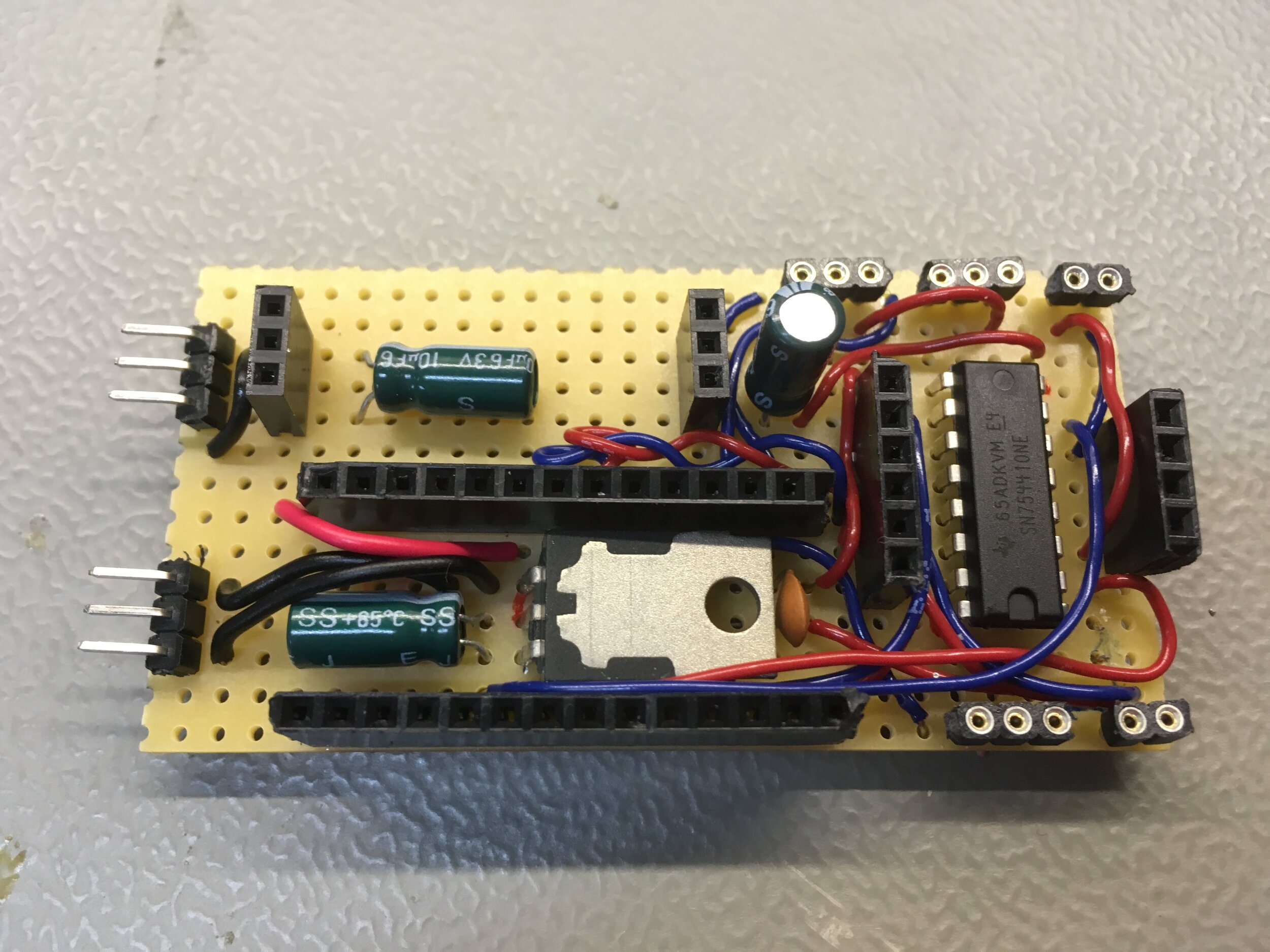
For this year’s robot my inital goal was to make it as fast as possible. So instead of easy-to-use but slow 360 servos, I went with some traditional gear motors. I made new electronics for the robot, but the software is mostly an evolution of my previous robot.
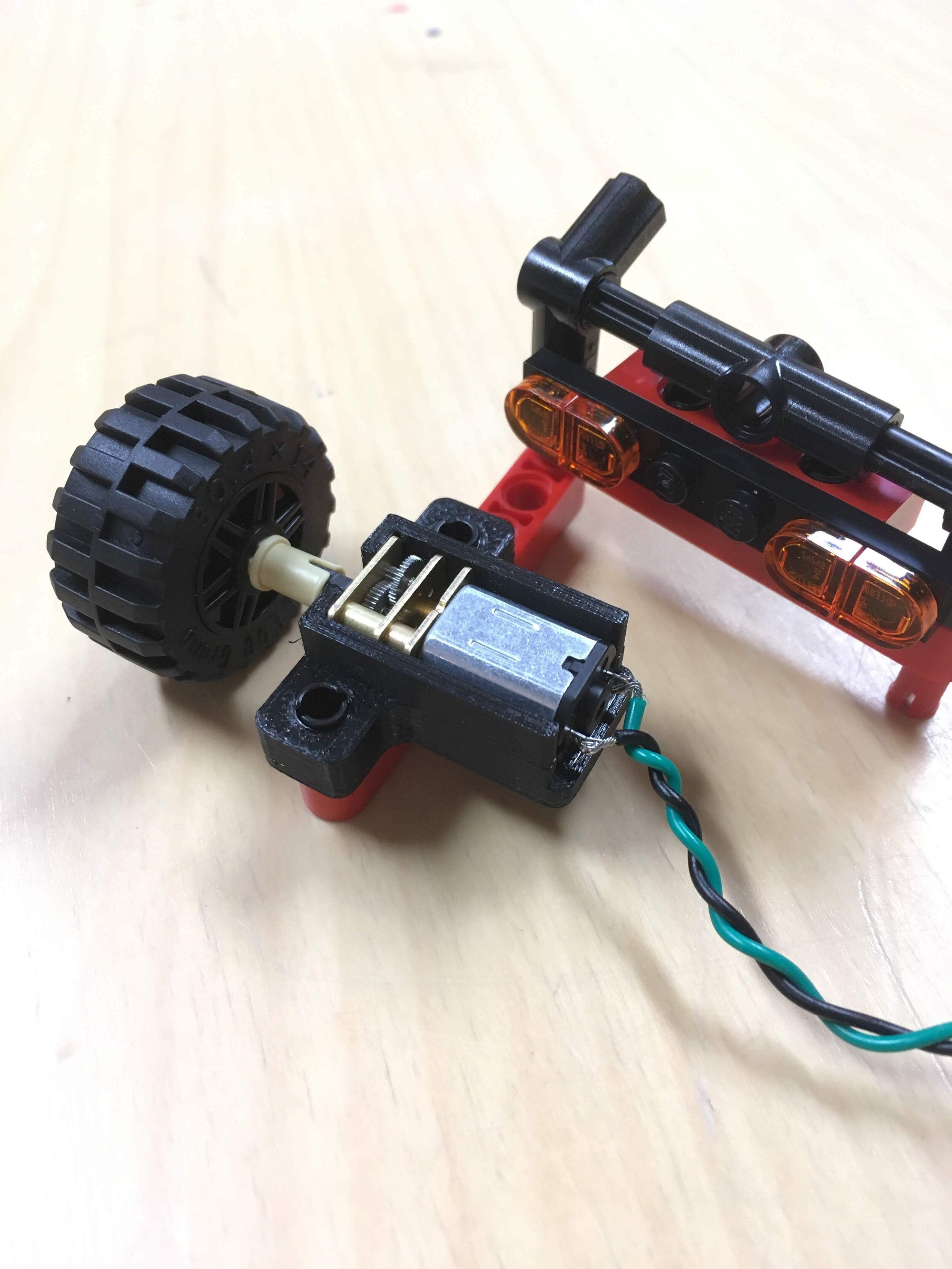
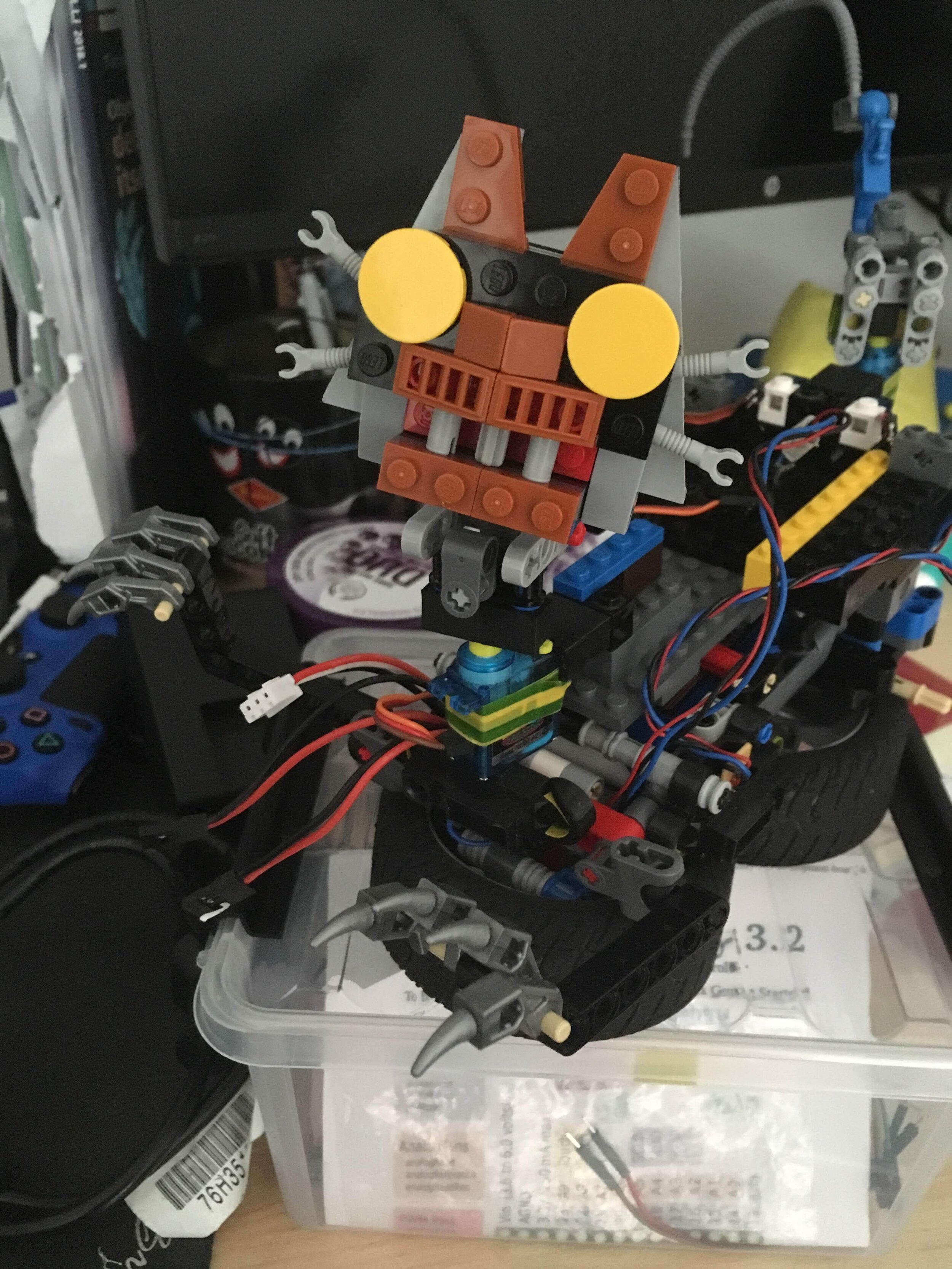
When looking for wheels to use, I realized that LEGO makes some of the best miniature wheels. While looking for the wheels, I also wanted to make the rest of the robot from LEGO. I used mostly LEGO Technic pieces, but 3d printed some adaptors to connect the motors and the sensors to LEGO Technic. That was a fun challenge and ended up working relatively well. Unfortunately I got carried away designing the rest of the robot with LEGO and it became much larger than expected with animated cat face and tail and some useless parts like front feet. In the race, the robot got stuck because of the extranous parts.
All code available in Github: https://github.com/joonamo/maze_robot
What I used in this project
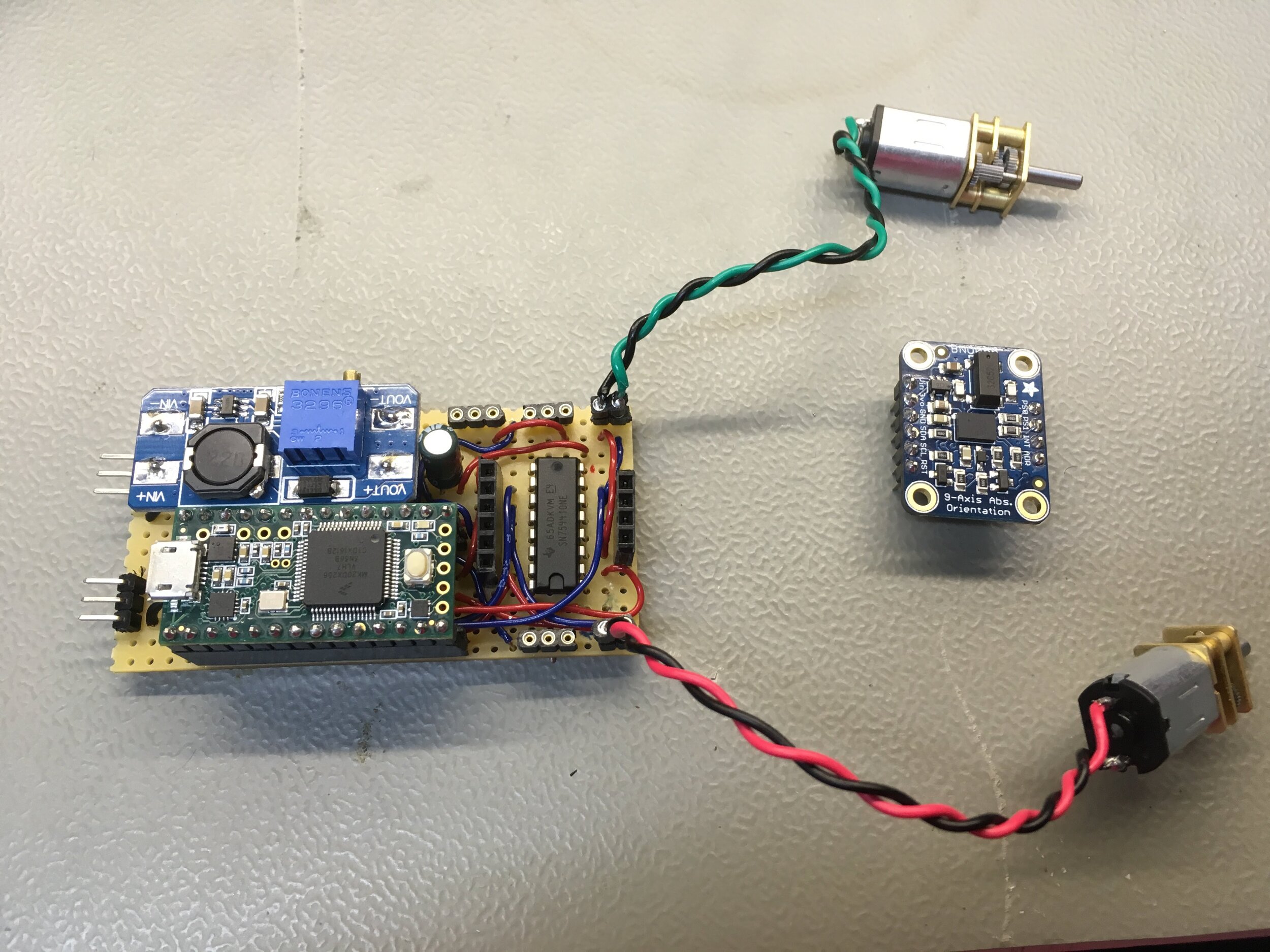
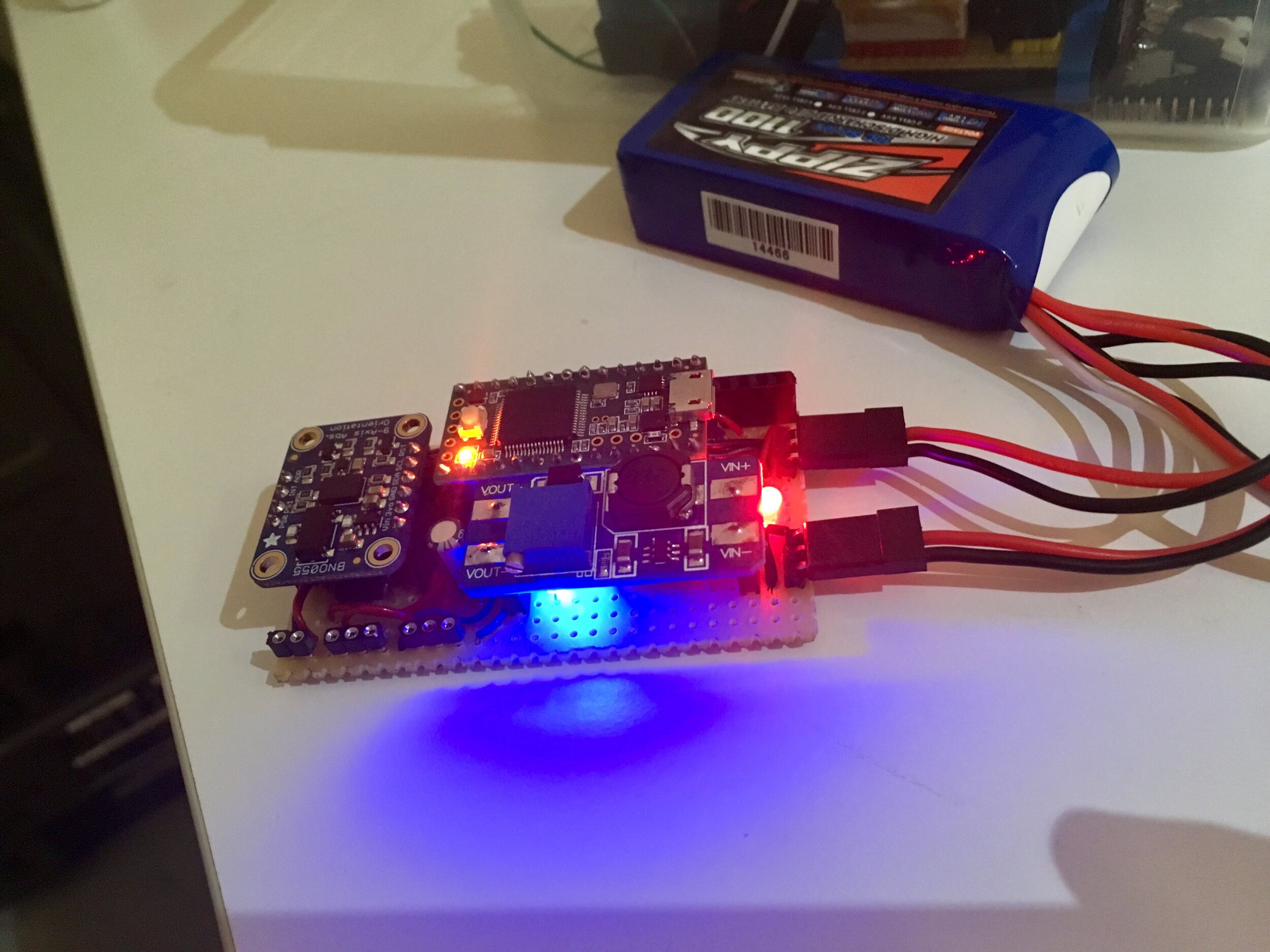
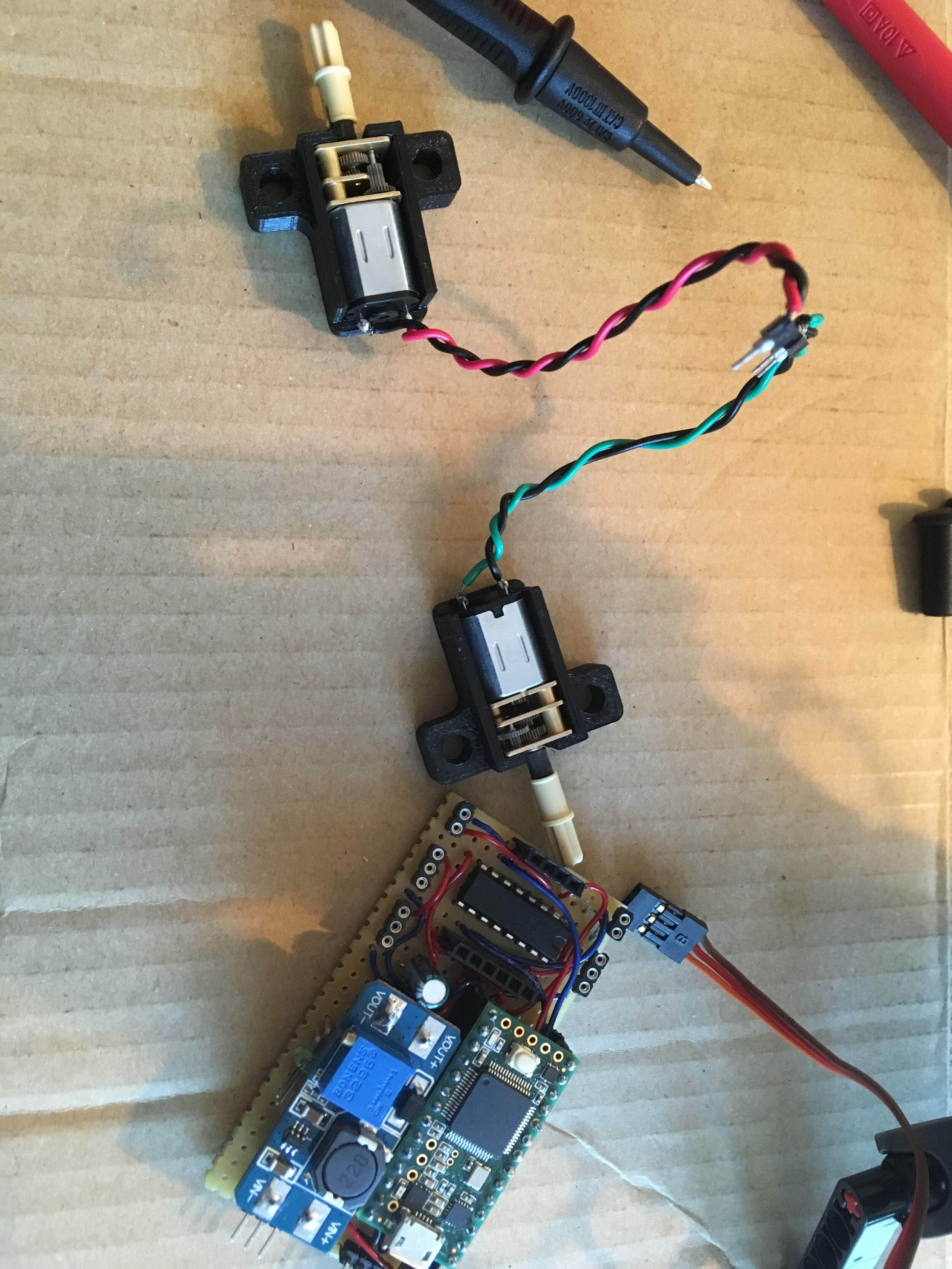
- Teensy 3.2 microcontroller
- Arduino (software)
- Autodesk Fusion 360
- Helsinki Hacklab’s Mendel 3d printer
- Sharp GP2Y0A41SK0F Proximity Sensor
- TI SN754410NE motor controller
- Cheap Chinese gear motors from eBay
- Cheap Chinese servo motors
- LiFe battery